作者: 时间:2026-06-25
本文提出一种多焦点光学分辨光声显微成像(Multifocal Optical‑resolution Photoacoustic Microscopy,简称MOR-PAM)方法,该系统采用单元件超声换能器,并结合光声显微成像分束器(光声显微成像分束镜)与定制设计的编码声学掩膜。DOE可生成8个直径为3μm的聚焦光斑,声学掩膜则用于对来自不同焦点的光声信号进行编码。在相同激光重复频率下,八焦点光学分辨光声显微成像的成像速度相较于传统OR-PAM(Optical‑resolution Photoacoustic Microscopy)提升了8倍。
光学分辨光声显微成像(OR-PAM)能够以高分辨率、高灵敏度实现细胞级、波长依赖型光吸收分布的可视化观测。然而,由于采用聚焦激光逐点扫描方式,OR-PAM的成像速度受限于激光重复频率。为突破这一局限,本文提出一种多焦点光学分辨光声显微成像(MOR-PAM)方法,该系统采用单元件超声换能器,并结合光声显微成像分束镜(DOE)与定制设计的编码声学掩膜。光声显微成像分束镜可生成8个直径为3μm的聚焦光斑,声学掩膜则用于对来自不同焦点的光声信号进行编码。在相同激光重复频率下,八焦点光学分辨光声显微成像的成像速度相较于传统OR-PAM提升了8倍。本文利用266nm激光器在10kHz重复频率下验证了八焦点光学分辨光声显微成像技术,以低成本方式实现了超越激光重复频率限制的快速OR-PAM成像。该方法可适用于多种OR-PAM系统结构,并为对高速成像有严苛要求的新兴应用提供支撑。
一、引言
光学分辨率光声显微镜(OR‑PAM)凭借其在细胞层级实现高分辨率、高灵敏度波长依赖性光吸收成像的能力,已被广泛应用于各类生物医学研究。然而,包括光学分辨率光声显微镜在内的高分辨率激光扫描显微镜,均需采用聚焦激光束逐点扫描,成像速度受到固有限制。
现有提速方案主要依赖更高脉冲重复频率的激光器,以及基于压电扫描器或微机电扫描镜的快速光束偏转技术。这些方法虽能提升扫描速度,但仍受限于激光脉冲重复频率上限。为突破该限制,研究者已尝试采用多激发光斑结合超声阵列,利用光声计算机断层扫描重建算法区分不同激发光斑,从而实现超越激光脉冲重复频率的高分辨率成像。但光声计算机断层扫描需要复杂且昂贵的多通道探测与数据采集系统,硬件开发成本高。
为兼顾低成本与高速光声成像,研究者开发了单探测器光声成像技术,通过遍历中继或混沌腔实现超声信号的时空编码。将光聚焦阵列与合适的重建策略结合,该声学编码思路也可实现光学分辨率光声成像。但这类方法通常需要依赖被测目标的校准,耗时且不便;同时对边界条件敏感,在不同环境下难以保证长期稳定性。
近期研究提出了无需目标依赖校准的单次成像改进方案,但因采用长声延迟线,高频信号衰减显著。
本研究开发了多焦点光学分辨率光声显微镜(MOR‑PAM),采用单阵元换能器与声学编码掩模实现成像速度提升。系统利用光声显微成像分束器与物镜产生多路聚焦激光束;光声信号穿过编码声学掩模后被超声换能器接收,信号衰减极小。光声显微成像分束器为薄玻璃片,可轻松集成到现有光学系统,将传统光学分辨率光声显微镜升级为多焦点光学分辨率光声显微镜,无需复杂昂贵的装置。本文定制了快速迭代收缩阈值算法,对混合光声信号进行解码与图像重建。
为验证可行性并评估性能,采用10kHz、266nm激光器对毛发模型与叶片骨架模型进行多焦点光学分辨率光声显微镜成像。结果表明,所提多焦点光学分辨率光声显微镜方案以更低的硬件复杂度与成本,实现了高速光学分辨率光声显微镜成像。
二、方法
A. 多焦点光学分辨率光声显微镜系统
多焦点光学分辨率光声显微镜系统主要包括:用于照射样品的Nd:YLF调Q 266nm纳秒脉冲激光器(QL266‑010‑O,CrystaLaser)、声学掩模、定制柱面聚焦换能器(焦距19mm,中心频率19MHz,−6dB双向带宽13–25 MHz)。采用可重构I/O设备(PCIE‑6323,美国国家仪器公司)与定制LabVIEW程序(美国国家仪器公司)实现激光脉冲、电机运动与数据采集的同步控制(图1a)。
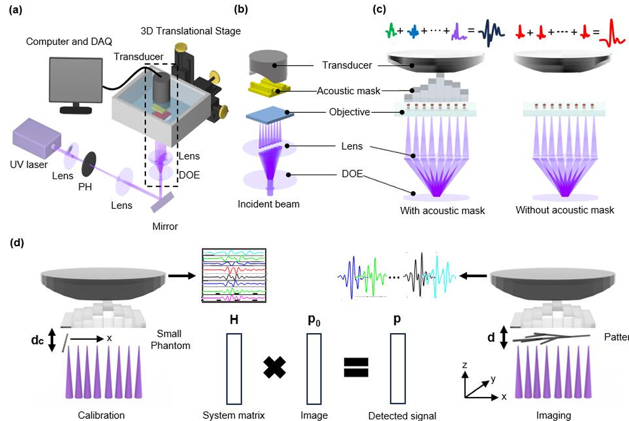
图 1 多焦点光学分辨光声显微成像(MOR-PAM)原理示意图
(a) MOR-PAM系统结构细节;
(b)图a中黑色虚线框区域放大视图;
(c) MOR-PAM对比示意图:左侧为加装声学掩膜、右侧为无声学掩膜。无掩膜时(右侧),不同焦点产生的光声信号会发生重叠,无法区分;
(d) MOR-PAM信号标定与基于快速迭代收缩阈值算法(FISTA)的图像重建原理。向量P0由初始声压构成,向量P为换能器采集的离散化信号,H代表系统矩阵。
266nm激光器脉冲重复频率10kHz,脉宽2 ns。激光束经一对平凸透镜扩束、15μm高能针孔(900PH‑15,纽波特公司)空间滤波后入射至光声显微成像分束镜(HOLO/OR公司)。浸没于水中的样品安装在定制三维扫描台(三个步进电机,PLS85,PI Micos公司)上,通过扫描完成成像。声学掩模置于距超声换能器2mm处,在探测前对光声信号进行编码。探测到的光声信号经两级低噪声放大器(ZFL‑500LN+,MiniCircuits公司)放大,由数据采集卡(ATS9350,Alazar Technologies公司)以500MHz采样率数字化。
将传统光学分辨率光声显微镜改造为八焦点光学分辨率光声显微镜时,只需在物镜前的光路中插入衍射光学元件,使光束在一维方向上分束。采用发散角37°的衍射光学元件(HOLO/OR公司)与焦距60 mm的物镜(Thorlabs公司),入射光束在物镜焦平面上沿一维形成8个聚焦光斑。光束直径约为3μm。
为区分柱面聚焦换能器接收到的来自多焦点的光声信号,在换能器与样品之间的超声波传播路径中放置阶梯形声学掩模(图1b、图1c),实现对不同焦点光声信号的空间编码。8个焦点沿一维分布,并与柱面聚焦换能器的线焦点对齐,以保证探测灵敏度。
为表征各焦点光声信号用于重建,采用单一焦点光束照射人体毛发样品采集信号。毛发模型(直径约90μm)垂直于8个激光焦点轴线放置,焦点在焦平面上间距300μm。由于毛发尺寸远小于焦点间距,校准过程中每次仅有一个焦点照射毛发。校准得到的光声信号作为系统矩阵,用于表征声学掩模的空间编码效果,完成一次系统标定后即可对不同样品成像(图1d),无需针对目标重新校准。
与采用换能器阵列的光声计算机断层扫描装置相比,本多焦点光学分辨率光声显微镜系统整体硬件成本显著降低。
B. 声学掩模
为实现光声信号的空间编码,在换能器探测前对透射波引入位置相关相移,即加入编码声学掩模。为使不同焦点的光声信号具备足够差异,同时对信噪比影响最小,掩模材料需与水的声速差异大、声衰减低。本研究选用声学性能友好的PLA材料,可通过3D打印快速制备,易得性高。PLA在1MHz下每毫米传播距离的超声衰减为0.231dB,声吸收低。
利用MATLAB中的k‑Wave工具箱对掩模形状与尺寸进行仿真。仿真参数:水声速1480 m/s、密度1000 kg/m³;PLA 掩模声速2200m/s、密度1240kg/m³;换能器中心频率20MHz。通过分析不同参数下8路信号的相关矩阵,评估编码信号性能,优化掩模参数。皮尔逊相关系数用于衡量两路信号相似度,1为完全正相关,0为无相关。经仿真,选取使相关系数最小的参数作为掩模微阶梯的宽度与厚度。最终,最优参数的PLA掩模由3D打印制备(CraftBot Plus,Ultimaker公司)。
C. 超声换能器制备
本研究制备并采用铌酸锂(LNO)单晶超声换能器(Boston Piezo‑optics公司),其在高频超声探测中灵敏度优异。20 MHz铌酸锂单晶两面溅射 Au/Cr(100 nm/50 nm)电极,经切割机(Tcar 864‑1,Thermocarbon公司)切割为14.9 mm×14 mm方形单元。定制金属外壳用于固定与电磁屏蔽,铌酸锂单元通过环氧胶固定于外壳中,填充间隙实现电隔离。为最终接地,在换能器表面再次溅射 Au/Cr(100 nm/50 nm)电极,连接铌酸锂单元与金属外壳。整个换能器表面涂覆15μm苝C作为匹配层,并通过派瑞林涂层机(SpecialtyCoating Systems公司)制备防水保护层(图2a)。
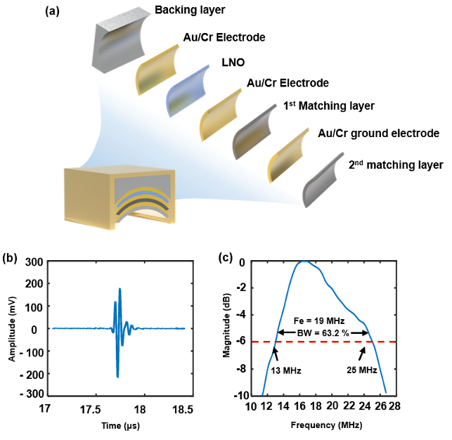
图 2 单元件超声换能器的性能表征
(a) 单元件超声换能器的结构示意图与爆炸拆分图;
(b) 换能器测得的脉冲回波(双向)波形;
(c) 脉冲回波信号的快速傅里叶变换频谱,标示出换能器的−6 dB 双向带宽。
对换能器时域脉冲/回波响应进行表征(图2b):将平整金属块置于换能器前方作为声反射体,超声脉冲/接收器(DPR300,JSR Ultrasonics公司)产生电脉冲激励换能器,信号由数字示波器(MSO54,泰克公司)记录。测量时换能器浸没于水槽中。对信号做傅里叶变换得到换能器频谱(图2c)。
D. 多焦点光学分辨率光声显微镜重建
在多焦点光学分辨率光声显微镜中,采集到的混合光声信号是各焦点光声信号的线性组合。本方法将激发限制为8个焦点,点源靠近虚拟探测面,因此可将换能器在8个位置的响应线性叠加,重建多焦点光学分辨率光声显微镜中的混合光声信号,数学表达为:
pm′1,m2(t)=∑K k=1p0,(k−1)M′1+m′1,m2hk{t−[(d−dc)/c]}
其中,c为水中声速,K为焦点数(本研究K=8),K个焦点沿坐标系x方向分布;M′1为x轴平移位置数,x 轴总像素数M1=KM′1;d、dc分别为成像与校准时物平面到掩模最近表面的距离;M2为y轴B扫描数;p0,m1,m2为 x、y轴索引m1、m2像素的初始声压;hk(t)为校准时第k个焦点的换能器响应;pm′1,m2(t)为第m2次B扫描中第m′1个平移位置的换能器探测信号。
为保证重建准确,需对8个位置进行系统校准。直接校准每个焦点可能因校准与实际焦点位置偏差引入误差。由于多焦点光学分辨率光声显微镜不进行全平面校准,本研究采用替代方案:对校准位置信号引入微小时延,近似实际焦点的响应。
该近似成立的条件为:对每个焦点,当其到掩模表面的距离从dc变为d时,单一d−dc值可补偿焦点到掩模表面所有点的声程差,即d−dc与声程差的偏差远小于中心波长。
本系统中取d−dc≈1.2μm,可保证换能器在各位置的响应基本不变,实现高保真光声信号重建。
将正向模型离散化:p=Hp0其中,p0为由M1M2个像素初始声压构成的向量,p为M′1M2个位置上换能器探测到的L个时间步离散信号构成的向量,H为尺寸M′1M2L×M1M2的系统矩阵。
给定一组探测信号p,通过求解正则化最小化问题重建图像:

其中,∣p0∣TV为p0对应二维图像的全变分(TV),λ为正则化参数。全变分正则化可使图像呈分段平滑结构,本质是一种稀疏约束。数值求解采用快速迭代收缩阈值算法[24]。综合图像重建质量与时间成本,快速迭代收缩阈值算法迭代次数设为6;正则化参数λ经实验目视评估确定,在噪声抑制与结构保留之间取得稳定平衡,不会明显降低横向分辨率。
三、结果
A. 声学掩模数值仿真
采用k‑Wave对带声学掩模的柱面聚焦换能器采集信号进行建模,基于k‑WaveMATLAB包中简化的二维传感器掩模示例与均匀介质开展仿真。仿真参数:超声换能器中心频率20 MHz,单向带宽89%,孔径直径14 mm。仿真介质包含声学掩模与传播空间水。初始声压定义为8个点源,间距300μm,模拟多焦点光学分辨率光声显微镜焦平面上8个聚焦光斑产生的光声信号,可得到光声波传播过程与聚焦换能器接收的编码信号。
声学掩模采用阶梯形结构,台阶设计与实验装置匹配。掩模厚度变化使入射光声波前产生空间相关时延,球面波前发生与焦点相对掩模位置相关的畸变,使8路接收波形与无掩模情况差异显著。
仿真中对微型阶梯结构掩模的台阶宽度(0.1–0.8 mm)与高度(0.1–0.6 mm)进行遍历,对每种掩模配置生成8路信号并计算平均相关系数。结果显示,台阶宽度0.6 mm、高度0.2 mm时平均相关系数最低,为最优参数(图3)。
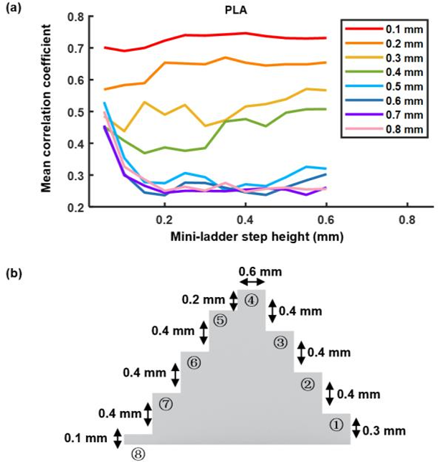
图3基于K-wave仿真的声学掩膜参数优化
(a) 针对声学掩膜不同微型阶梯高度与宽度,平均相关系数的K-wave仿真结果;
(b) 声学掩膜设计参数,单个微型阶梯宽度为0.6mm。
基于最优参数确定编码声学掩模,仿真8个光声点源信号在有无掩模时的超声传播过程。无掩模时(图4a),8个点源的光声信号相互重叠;加入优化声学掩模后(图4b),8路光声信号经空间编码呈现显著不同的波形,平均相关系数降至0.37。
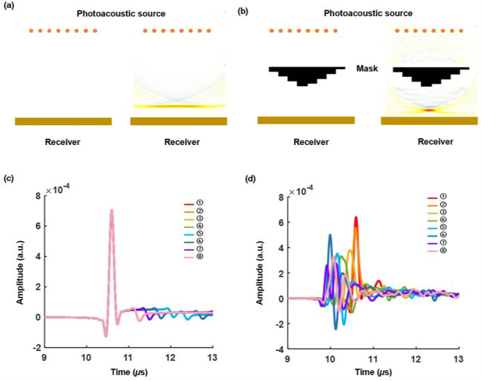
图4二维编码声学掩膜仿真
(a) 柱面聚焦超声换能器接收的8个光声点声源;
(b) 搭载编码声学掩膜时,单元件超声换能器接收的8个光声点声源;
(c) 对应图 (a) 产生的光声信号;
(d) 对应图 (b) 产生的光声信号。
图4a与图4b中,左图为t=0时刻的声场分布,右图为声波即将抵达超声换能器时的声场分布。
为定量评估编解码性能,基于最优掩模参数开展仿真,将合成编码信号应用于400×200像素目标图像(视场4mm×2mm,像素尺寸10μm,图5c),在不同噪声水平与多路复用程度下重建图像(图5)。图5a、5b为8路编码分别叠加5dB、10dB高斯噪声;图5c为16路编码叠加10dB噪声。
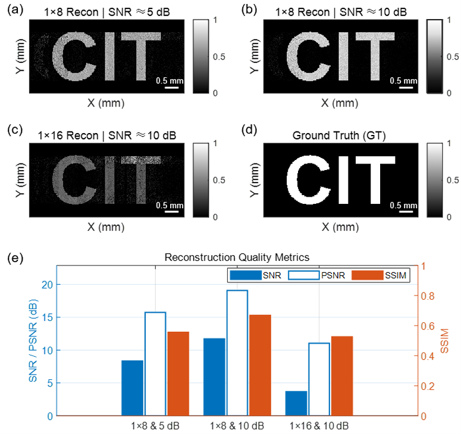
图 5 噪声与多路复用条件下重建质量的仿真评估
(a) 8 路编码信号、5 分贝噪声下的重建结果;
(b) 8 路编码信号、10 分贝噪声下的重建结果;
(c) 16 路编码信号(采用同一掩膜)、10 分贝噪声下的重建结果;
(d) 真实基准图像(GT);
(e) 图 (a)–(c) 的质量评价指标:信噪比与峰值信噪比(左纵轴,单位:dB)、结构相似性(右纵轴,取值 0–1)。图 (a)–(c) 的重建运算,均采用基于图 3 优选掩膜参数生成的仿真编码信号。
将所有重建图像归一化至真值0–1范围,报告信噪比(SNR)、峰值信噪比(PSNR)与结构相似性(SSIM)(图5e)。结果定量表征了重建保真度随噪声与通道数的变化:在固定光通量与相同掩模下,增加并行编码点数会降低单焦点信噪比、加剧通道间混叠,导致保真度下降。可通过为目标点数定制掩模以进一步降低系统矩阵列相关性、改善条件数,或在允许范围内提高激发能量来缓解上述影响。
B. 声学掩模表征
根据仿真结果,通过3D打印制备编码声学掩模,关键参数如图5a所示。校准过程中,以步长0.01 mm扫描人体毛发模型,每次仅有一个焦点照射毛发,提取8个焦点位置的A‑line信号构成基础系统矩阵H,等效为8路虚拟换能器用于二维重建,且系统矩阵与目标无关。重建时,8个焦点激光脉冲照射样品产生的光声信号,等效为这些虚拟换能器信号的线性组合,采用快速迭代收缩阈值算法重建二维体积初始声压(方法部分)。
为定量表征掩模对信号传输的影响,测量有无编码时吸收体产生并由20 MHz 聚焦换能器记录的光声波形。无掩模(图6a)与有掩模(图6b)时,8通道平均RMS幅度从214 mV略降至210 mV,在0.1–1.5 mm厚度范围内衰减 0.04–0.34 dB(0.3%–3.8%),总RMS能量损失小于2dB,表明掩模保留了可靠编码与重建所需的大部分信号能量。各通道间小幅幅度差异(如图6b中#5、#6通道)源于局部相长干涉与换能器通道相关灵敏度,而非测量误差。
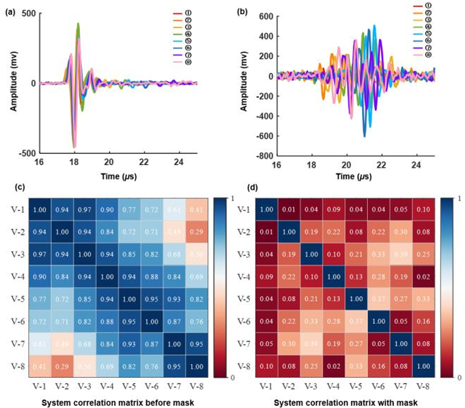
图 6 自研二维编码声学掩膜的实验表征
(a) 八个光声点声源在无掩膜条件下于水中传播产生的八路响应信号;
(b) 加装声学掩膜后,八个光声点声源在水中传播产生的八路响应信号;
(c) 无掩膜条件下的相关系数矩阵;
(d) 加装掩膜后的相关系数矩阵。
与长传播、高衰减的声学编码方案相比,本编码方法因PLA掩模带来的损失小于2dB,适用于高频光声探测。
为评估声学掩模编码性能,分析有无掩模编码的系统矩阵。无编码时(图6a),8个光声点源信号间相关性强(平均系数0.81,图6c);加入掩模编码后(图6b)降至0.27(图6d),信号可更好分离。实验结果(图6)与仿真(图4)的波前差异源于模型与实验的固有偏差:二维仿真无法完全覆盖实验中三维波传播效应;仿真声学参数(假设声速、密度)与实际组织特性的偏差,也会通过改变传播动力学与介质相关衰减行为影响波前形态。
进一步通过计算条件数量化系统矩阵:无编码时条件数约23.7,呈中度病态;加入优化声学掩模后降至3.4,证明重建数值鲁棒性大幅提升,可在快速迭代收缩阈值算法中结合全变分正则化实现准确稳定重建。
C. 多焦点光学分辨率光声显微镜表征实验
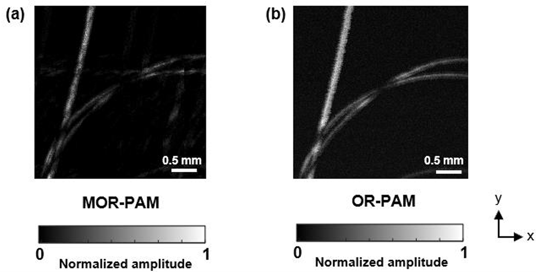
为实验验证所提多焦点光学分辨率光声显微镜系统,首先对人体毛发制备的二维结构(直径约90μm)成像。结构固定在空心基座边缘,由8个266nm聚焦激光点照射,单脉冲能量180nJ。样品与声学掩模间距15mm,掩模位于换能器前方2mm。平行与垂直于焦线方向扫描步长均为10μm。
多焦点光学分辨率光声显微镜在约6秒内完成3.6 mm×3.59 mm图像采集,而相同激光重复频率与步长的传统光学分辨率光声显微镜需约50秒。图7a为多路复用信号重建的毛发模型XY平面最大幅值投影,图7b为传统光学分辨率光声显微镜对应结果。多焦点光学分辨率光声显微镜重建清晰还原毛发特征,验证空间编解码流程的有效性。图7a中轻微图像劣化源于多路采集时信号分离不完全,有效信噪比低于单焦点扫描。
图7人体毛发结构仿体二维实验成像
图(a) 多焦点光学分辨光声显微成像(MOR-PAM)采集的二维最大振幅投影图;
(b) 传统光学分辨光声显微成像(OR-PAM)采集的二维最大振幅投影图。
Norm.:归一化处理。
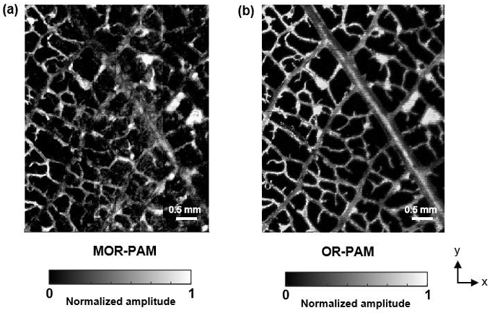
为进一步验证系统对复杂空间图案的重建能力,对叶片骨架模型开展额外实验,成像配置与毛发模型一致。图8a 显示多焦点光学分辨率光声显微镜重建成功还原叶片骨架致密类血管网络,图8b为传统光学分辨率光声显微镜对应结果。尽管存在少量伪影,整体结构被忠实重现,证明所提方法在成像复杂、非稀疏样品时仍保持鲁棒性。
图8叶脉骨架仿体的二维实验成像图
(a) 经多焦点光学分辨光声显微成像(MOR-PAM)获取的二维最大振幅投影图;
(b) 经传统光学分辨光声显微成像(OR-PAM)获取的二维最大振幅投影图。
Norm.:归一化。
四、结论与讨论
综上,本文验证了声学掩模可使单阵元换能器实现多焦点并行探测,从而加速光学分辨率光声显微镜成像。塑料掩模在超声场中引入位置相关相位,使混合光声信号中各焦点信号可被唯一识别;混合信号为各焦点信号的线性组合。
本多焦点光学分辨率光声显微镜系统相比传统光学分辨率光声显微镜成像速度提升8倍,系统仅增加极低额外成本(3D打印PLA掩模)。提速效果取决于衍射光学元件形成的有效焦点数,在激光功率充足时可进一步增加。通过毛发模型与叶片骨架模型成像实验成功验证多焦点光学分辨率光声显微镜方法,实验测得横向分辨率3μm;若需更高横向分辨率,可进一步提高数值孔径。
为优化系统成像性能,本文设计增强型正则化算法实现混合信号有效分离。仿真表明,该方法可成功分离并重建信噪比约10的8路混合信号;并通过多焦点光学分辨率光声显微镜系统实验验证其混合信号分解能力。
当前实现的主要挑战:编码掩模与超声换能器不透明,反射式成像中难以照射被测目标,影响光学聚焦。未来系统可集成光学透明光声耦合器,实现反射式成像的同轴光声入射。
本研究采用毛发模型与叶片骨架模型验证系统可行性,这些样品适用于展示核心性能;未来将针对组织切片与生物异质组织开展研究,更全面评估系统在真实生物医学场景下的成像能力。
目前,采用266nm激发的紫外光声显微镜(UV‑PAM)的主要局限是商用激光器脉冲重复频率低(10–20 kHz),严重限制成像通量。因此,基于266nm激发的紫外光声显微镜系统将显著受益于并行采集策略;这与常用 532 nm 激光器形成对比,后者已实现 1–2 MHz重复频率用于光声显微镜成像。
值得注意的是,尽管本文在266nm波段验证多焦点光学分辨率光声显微镜,该方法可轻松适配其他波长(如 532 nm),用于在体血管或肿瘤成像。
此外,在激光能量充足、编码鲁棒的前提下,焦点数可进一步提升。当前系统中,180nJ 脉冲由8个焦点共享(每焦点约22.5nJ),重建信号信噪比为10–14 dB;理论上100μJ激光器可支持约200个焦点并保持相当信噪比。
为实现未来可扩展性,可采用二维衍射光学元件生成网格状聚焦阵列;但增加焦点数可能导致信号间相关性增强,反问题病态程度加剧。为在该配置下保持信号可分离性与重建稳定性,将探索更先进的编码策略与正则化或数据驱动重建算法。
本工作不仅为紫外光声显微镜技术,也为所有需要高速成像的生物与生物医学应用光学分辨率光声显微镜带来新机遇。本文采用声学掩模与单阵元柱面聚焦换能器实现多焦点紫外光声显微镜成像,通过仿真与实验证明,该方法可突破激光重复频率限制,提升光声显微镜成像速度。我们相信该方案将为高分辨率光声显微镜应用提供新路径,也可拓展至微创成像导管等应用,克服高速光学分辨率光声内窥镜中容纳大量超声阵列的薄型化限制。
实验证明,仅需带编码掩模的简易装置即可实现并行光声成像,无需复杂硬件。该技术在推动高分辨率光声显微镜应用方面具有广阔前景。
文章来源:X. Luo, R. Cao, P. Hu, Y. Luo, Y. Zeng, Y. Zhang,
M. Cui, Q. Zhou, G. Ku, and L. V. Wang, “Multifocal optical-resolution
photoacoustic microscopy with a masked single-element transducer,” IEEE Trans.
Med. Imag., vol. 44, pp. 1–1, Dec. 2025, doi: 10.1109/TMI.2025.3643618.