作者:叶gx 时间:2026-07-02
本文利用SH传感器(夏克-哈特曼微透镜阵列、夏克哈特曼微透镜)实现全息成像的方法,并在实验上实现了透射式无透镜成像装置(全息成像微透镜阵列或SH传感器微透镜阵列),能够对高对比度物体获得接近衍射极限的分辨率。需要快速记录和快速处理大量相对低分辨率全息图的应用中(如动态全息干涉测量、流式细胞术、动态显微成像),有望用于显微成像和扩展景深的通用相干成像。此外,复光场的直接重建可以创建虚拟自适应光学系统,通过计算来校正成像路径中的像差。这种方法还可用于通过大气湍流对远程物体进行相干多孔径成像。
一种高分辨率夏克-哈特曼波前传感器已被用于相干全息成像,通过计算机重建和无透镜成像装置中的复场传播来实现。利用实验数据获得的图像分辨率与衍射理论吻合良好。尽管使用参考光束进行适当校准可提高图像质量,但该方法在显微镜和湍流成像应用中,具有利用空间相干单色及窄带多色光源实现无参考全息成像的潜力。
1.介绍
利用全息方法记录复电磁场,可以在任意传播点上重建相位和振幅。通常,光学全息图是通过记录物波和参考波所产生的干涉图样来制作的。然后,通过将参考光束散射到全息图上,即可恢复物波场。
数字全息方法将波场记录到计算机中,从而利用衍射和干涉的物理光学模型,通过计算波传播来实现物场重建。数字全息具有全息图采集速度更快、实验装置简单等潜在优势,最显著的是能够获取光场的完整振幅和相位信息。一旦知道复振幅,就可以操纵波前来回溯性地校正像差,将自适应波前校正的方法扩展到虚拟域。
由于相位信息无法直接获取,人们已发展了多种从强度测量中重建相位的方法。相位恢复和相位分集技术已被用于推导光场的计算机描述。这些方法通过求解逆源问题,利用数值方法(如Gerchberg-Saxton算法)来重建复振幅。在这些情况下,仅从记录的强度中重建复光场是一个病态问题。
夏克-哈特曼(SH)传感器(夏克-哈特曼微透镜阵列)是自适应光学中常用的一种简单工具,用于记录局部波前倾斜的阵列[14]。每个子孔径形成一个斑点状的点扩散函数(PSF)图像,其中光斑质心的偏移量与局部波前导数成正比。根据质心偏移阵列,可以在单次拍摄中高效地重建波前。
在这项工作中,我们描述了利用高分辨率SH传感器(夏克-哈特曼微透镜阵列)直接获取的相位和强度实现全息图像重建的实验过程。
2. 方法
基于SH传感器(夏克哈特曼微透镜)的全息成像装置示意图如图1所示。一束空间相干光束照明透明物体,散射场由高分辨率SH传感器(夏克哈特曼微透镜)记录。记录到的强度包含了相位梯度和强度场的采样信息,这些信息可用于重建传感器平面上的复光场,并通过将复光场反向传播至物平面,从而获得物体的相干全息图像。尽管该方法应用于透明物体,但类似的装置也可用于反射和散射物体的成像。
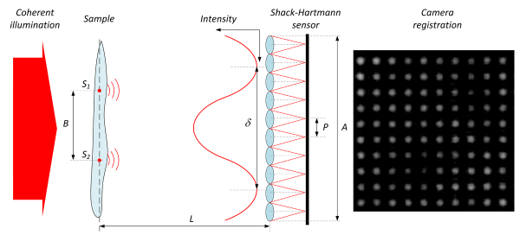
图1. 基于SH传感器(全息成像微透镜阵列)的全息成像装置
对于一个全孔径为A、间距为p的SH传感器(全息成像微透镜阵列),其分辨率可以通过分析属于物平面的两个相干点光源S1、S2所产生的干涉来估计。如果这两个光源之间的距离等于B,则在距物平面距离为L处的传感器平面上,干涉条纹周期d由下式给出:
d=λL/B(1)
为了避免任何信息损失,条纹周期应小于传感器孔径:δ < A。根据这一条件,我们可以推导出传感器仍能分辨的两个点光源之间的最小距离的表达式:
Bmin=λL/A(2)
其中,小于Bmin的物体特征将无法被传感器分辨。
另一方面,根据奈奎斯特准则,传感器平面上的最小条纹周期应至少覆盖2个微透镜:d= 2p,由此我们可以推导出物平面上的最大视场表达式:
Bmax=λL/2p(3)
条件 (3) 具有简单的物理意义:整个物体应足够小,以至于单个微透镜无法分辨它。这一条件区分了我们的方法与参考文献 [15,16] 中描述的方法,后者中每个子孔径都能分辨物体。如果物体大于Bmax,则重建的光场将出现由混叠引起的寄生低频调制。在某些情况下,当低频调制不重要时,视场可以选择得比条件 (3) 所定义的值更大。
在理想的无混叠情况下,可分辨元素的总数由下式给出:
Bmax/ Bmin=A/2p(4)
沿着所选坐标方向,可分辨元素的数量是微透镜数量的一半;而在物平面上可分辨的总像素数则是传感器矩阵中微透镜数量的四分之一。
从高分辨率SH图案重建复光场需要几个步骤。通过对波前梯度进行积分可获得相位[17]。由于全息图中可分辨元素的数量与微透镜数量成正比,因此高分辨率成像应使用大型微透镜阵列。参考文献[18–20]中发展了适用于处理SH传感器产生的大规模光斑点图像阵列的特殊相位重建方法。在这些方法中,SH强度图案被表示为一系列干涉条纹的组合。对该图案进行傅里叶变换,然后将傅里叶域中沿频率轴fx和fy的第一旁瓣移至原点。接着,通过对平移后的强度分布进行逆傅里叶变换并取辐角,得到相位导数øx和øy。然后,梯度Wx和Wy可由下式导出:
Wx = pøx/(2πF), Wy = pøy/(2πF),(5)
其中,\( F \) 是微透镜阵列的焦距。
一旦获得梯度信息,就可以通过基于傅里叶的模态重建方法重建波前 [21–23]。
Wˆ (fx, fy) = −i [(fx Wˆx+ fy Wˆy)]/2π(f2x + f2y)(6)
在这里,傅里叶级数被视为波前的一组基函数。
Wˆ用于表示W的角谱。参考文献 [24] 指出,在公式 (6) 中用2sin(f/2)替换f可获得更好的噪声性能。我们对两种重建器都进行了尝试,但未发现明显差异。
在进行基于傅里叶的波前重建之前,必须对梯度场进行预处理。由指数函数的辐角导出的øx、øy 的取值范围为 [0, 2π],存在大量不连续性。根据所采用的方法,可能需要进行相位展开[25],以获得平滑的相位函数,用于构建传播的物理光学模型。
强度场可以通过使用合适的低频滤波器平滑光斑图案来获得。传感器平面上的最终复光场通过将相位场与强度场相结合而得到。最后,通过将复光场反向传播到物平面,重建出物体的振幅和相位分布。
3. 模拟
在数值模拟中,我们采用了第4节所述实验装置的参数(如图1所示):波长为 λ = 633 nm 的准直光束被正透明分辨率测试图(如图2所示)散射。为了表示复光场,我们使用了一个采样尺寸为 n×n = 2048×2048 像素、像素间距 µ = 5.5 µm 的方形阵列。光束透过样品后,传播至距离 L = 0.5 m 处的夏克-哈特曼传感器。SH 阵列由 N×N = 140×140 个正交排列的微透镜组成,间距 p = 63 µm,每个微透镜的焦距为 2 mm,阵列总孔径 A = 8.82 mm。根据公式 (2),我们装置在物平面上的分辨率等于:
Bmin=λL/A= 35µm(7)
并且总视场为Bmax= Bmin*N/2 = 2.45mm。
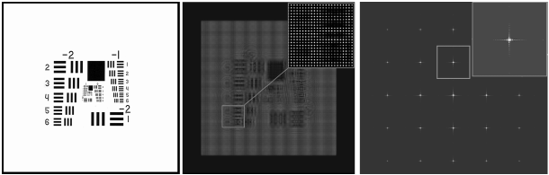
图2.
数值模型:分辨率测试图(左)。距测试图0.5米处SH传感器获取的强度图案(中)。强度图案傅里叶变换的中心部分及旁瓣(插图),用于重建局部波前倾斜的x和y分量(右)。
模拟过程首先从通过强度掩模对相干光波场进行滤波开始。随后,滤波后的波场传播至SH传感器,再经过与SH阵列对应的相位掩模滤波,最终传播到像平面。在像平面处,强度分布由一台具有线性强度响应、像素间距为5.5微米的模拟相机记录。SH传感器记录到的模拟强度图案I0(x,y)如图2中间部分所示。
图2右侧部分显示了记录的SH传感器强度图案I0(x,y)的离散傅里叶变换(DFT)结果。位于中心距离 d = µN/p ≈ 179像素处的四个对称旁瓣包含了相位信息。DFT图像的尺度由输入数组的零填充定义。旁瓣在对应于微透镜数量N的140×140像素窗口中被提取出来,并平移至原点。通过对平移后的中心旁瓣应用逆DFT,得到了波前梯度。
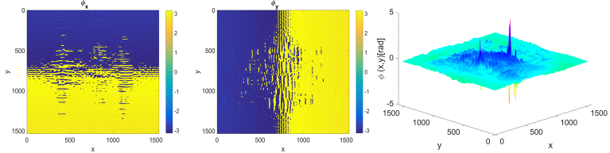
图3. 从逆傅里叶变换重建的对应于USAF测试图衍射的梯度øx、øy(左、中),以及波前重建结果(右)。
图3显示了包裹分布φx和φy。采用二维Goldstein分支切割解包裹算法[25,26]对梯度场进行了解包裹。利用公式(5,6)重建的波前W(x,y)如图3右侧所示。正如预期,波前具有低幅度的高频调制,在强度较低的区域(相位重建定义不明确的地方)存在一些较大的相位跳变。
SH图案 I0(x,y,L) 通过高斯滤波器进行平滑处理,得到强度场I˜0(x,y,L),如图4所示。SH传感器平面上记录的复光场可表示为 U(x,y,L) = Ö˜I0(x,y,L) exp(iθ(x,y,L)),其中 θ(x,y,L) = kW(x,y,L),k = 2π/λ。分辨率测试图平面上的复光场 U(x,y,0) 可以通过反向传播重建:
图4显示了传感器平面上的滤波后强度以及物平面中距离 L =
-0.5 m 处的分辨率测试图的数值重建图像。图像的分辨率与理论极限相符。数值实验的结果清楚地证明了该方法的有效性。
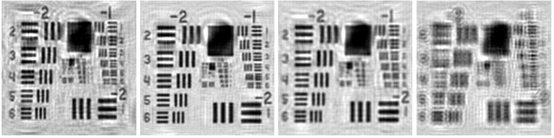
图5. 使用空间相干633 nm单色光源(左图)以及中心波长为633 nm、带宽分别为20、50和200 nm的多色光源(从左至右第2至第4幅图)获得的模拟图像重建结果。
与任何其他SH传感器一样,该重建方法预计对照明光源的时间相干性程度不太敏感。我们模拟了使用宽带光源获得的全息图重建结果,这些宽带光源由三条单色谱线组成:对于带宽∆λ=20 nm,三条谱线为λ1=623 nm、λ2=633 nm、λ3=643 nm;对于∆λ=50 nm,三条谱线为λ1=598 nm、λ2=633 nm、λ3=658 nm;对于∆λ=200 nm,三条谱线为λ1=533 nm、λ2=633 nm、λ3=733 nm。对于每个多色光源,我们通过将三个波长分别获得的强度图案进行非相干叠加来模拟SH光斑图案:I∑ = Iλ1 + Iλ2 + Iλ3。然后使用得到的多色光斑图案I∑,以中心波长λ2=633 nm相干地重建波前和物体。重建结果如图5所示,表明对于高达50 nm带宽的光源(在显著分辨率损失下可达200 nm),该方法具有稳健的重建能力,证明了该方法在多色空间相干光源下的有条件可用性。
4. 实验
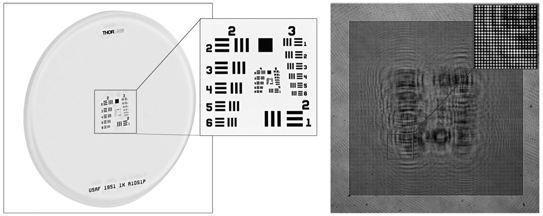
为了进行实验验证,我们按照图1所示的方案搭建了一套装置,所有参数均与上一节描述的模拟相匹配。采用正片USAF 1951测试靶(R1DS1P,Thorlabs,美国),如图6所示,作为测试物体。物体放置在SH掩模前方 L = -0.5 m 的距离处。SH阵列(OKO Tech)由 N×N = 140×140 个正交排列的微透镜组成,间距 p = 63 µm,焦距 F = 2 mm,方形阵列总尺寸 A = 8.82 mm。使用高分辨率相机 UI-3370(IDS公司)进行图像记录。
为了消除系统像差,我们在无物体的情况下记录了参考波前。原则上,这一步可以省略,但那样就需要使用某种虚拟自适应光学来补偿系统像差。参考光束的校准是一个简单的步骤,只需执行一次,只要照明光束保持稳定,校准数据即可持续使用。
图6. 正片1951 USAF测试靶(R1DS1P,Thorlabs,美国)(左图)以及SH传感器记录的图像(右图)。
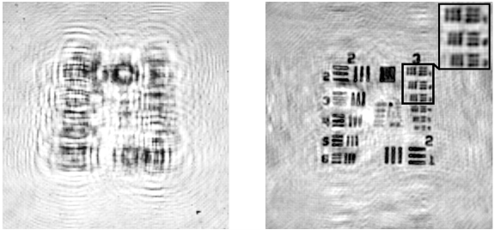
经过滤波和参考相位校正后,我们得到了SH传感器平面上的强度分布和相位分布。图6显示了由SH传感器记录的对应于物场的强度。图7展示了通过反向传播至L = -0.5 m距离处所获得的分辨率测试靶图像。
图7. 实验记录的滤波后强度(左图),以及通过将重建波反向传播至-0.5 m处获得的物体重建图像(右图)。
只有当SH传感器(SH传感器微透镜阵列)记录的图像中存在所有子孔径的光斑时,才能实现稳健的波前重建。理论上,散射光的高次谐波应该进入所有子孔径,即使是位于几何阴影中的子孔径也不例外。然而,记录这些高次谐波需要图像传感器具有较大的动态范围和高信噪比。在我们的实验中,使用标准的USAF 1951分辨率测试图,我们分辨出了第三组的第二个元素。分辨率由标准公式R =
2^G + (E/6) ≈8.95lp/mm)给出,其中G =
3、E = 2分别为组号和元素号。这对应于可分辨的线对间距为 56微米,接近理论极限35微米。我们将分辨率损失归因于测量噪声、相机有限的动态范围以及物体尺寸过大引起的混叠。此外,由于相干成像的固有非线性导致相干分辨率的定义存在一定模糊性,因此无法精确给出该方法的分辨率。关于相干分辨率定义的进一步讨论,请参见参考文献[27]。
5. 讨论
我们展示了利用SH传感器(SH传感器微透镜阵列)实现全息成像的方法,并在实验上实现了透射式无透镜成像装置,能够对高对比度物体获得接近衍射极限的分辨率。
该技术在需要快速记录和快速处理大量相对低分辨率全息图的应用中(如动态全息干涉测量、流式细胞术、动态显微成像),有望用于显微成像和扩展景深的通用相干成像。此外,复光场的直接重建可以创建虚拟自适应光学系统,通过计算来校正成像路径中的像差。这种方法还可用于通过大气湍流对远程物体进行相干多孔径成像,类似于文献[16,28]中提出的系统。
实验装置可以进一步优化以提高速度和简化结构。特别是,用于全息图记录的相机像素数量可以优化。在我们的装置中,每个微透镜下方使用了超过100个像素来记录光斑。实际上,一个4像素的四象限探测器就足以同时记录光斑的强度和质心。这引出了对记录相机像素数量的最低要求:每个微透镜需要4个成像传感器像素,而每个重建的全息图像素需要4个微透镜,从而得出最终图像中每个重建像素至少需要16个相机像素的结论。这一结论基于四象限探测器对光斑坐标呈线性响应的假设,设定了像素数量的理论极限。在实际中,包含大量四象限探测器的系统预计会呈现非线性且难以对准,但作者先前的研究[29]已证明基于四象限探测器的哈特曼传感器是可行的。相干反向传播通过利用相位在传播路径上多个不同平面中重建强度,将信息内容扩展到单一的强度分布之外。
文章来源:H. Gong, O. Soloviev, D.
Wilding, P. Pozzi, M. Verhaegen, and G. Vdovin, “Holographic imaging with a
Shack-Hartmann wavefront sensor,” Optics Express, vol. 24, no. 13, pp.
13729–13737, Jun. 2016, doi: 10.1364/OE.24.013729.
 (8)
(8)