作者:李gh 时间:2026-07-04
在工业检测、逆向工程、机器人引导等领域,三维(3D)形状测量是关键的技术环节。传统的结构光三维测量系统存在一个核心瓶颈:受限于传统定焦镜头的有限景深,其有效工作距离范围很窄,难以一次性精确测量具有大深度变化(例如深凹槽、复杂装配体)的场景。这通常需要反复调整镜头对焦或移动被测物体,效率低下且易出错。为了解决这一难题,我们提出一种创新的大景深、高速三维测量方案:液态透镜三维测量。该方案通过在相机端集成Optotune EL-10-30-Ci液态透镜,实现焦距的毫秒级电控快速切换。结合我们研发的同步控制与高效相位解算算法,该系统能够在无需物理移动任何组件的情况下,自动、连续地对大纵深范围内的物体进行高精度、高清晰度的3D测量,并将多个焦平面的测量数据无缝融合,获得完整、精确的3D点云。
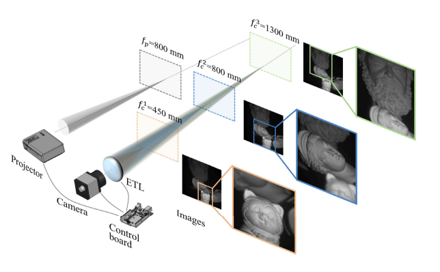
大自由度三维形状测量系统示意图
液态透镜三维测量适用场景:
-工业在线检测:快速测量尺寸变化大、结构复杂的零件(如发动机缸体、车身覆盖件)。
-机器人抓取与引导:在深度范围不一的工作台(如料框拣选)上精准定位物体。
-科学实验记录:实时捕获动态、快速变形过程的完整三维形貌。
核心技术原理与系统构成:
本方案的技术核心是“物理景深扩展”与“同步智能测量”,区别于通过算法增强模糊耐受度的“虚拟扩展”方法。我们通过改变相机光学系统的物理焦距,确保在任何测量距离下,相机都能捕获到对焦清晰的条纹图像,从根本上保证最佳的测量信噪比和细节还原度。
-核心硬件:Optotune EL-10-30-Ci 液态透镜
品牌与型号:Optotune 品牌的 EL-10-30-Ci 型液态透镜是系统的关键部件。
工作原理:基于可形变聚合物膜与光学液体的结合,通过外部施加压力(由配套驱动器控制电流实现)来改变透镜曲率,从而改变其焦距。其优点是无机械运动部件、响应快(毫秒级)、功耗低、体积紧凑。
关键性能:论文验证了其优异的重复性。在不同焦距设置下进行重复测量,球心Z坐标的标准偏差极小(如1378mm处,σz3=0.328mm),相对误差低至 0.024%,完全满足高精度3D测量的需求。其动态响应曲线显示,在焦距切换时,稳定时间在 8-15 ms 量级(可通过优化驱动信号进一步缩短至5ms以下)。
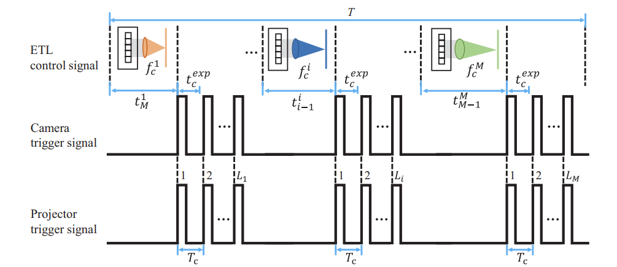
时序图:展示相机、投影仪与ETL的同步触发信号(UART控制电流切换)。
-系统工作流程:
多焦距预标定:系统预先在3个离散的、覆盖目标工作范围的焦距点(例如450mm, 800mm, 1300mm)分别进行高精度标定,建立每个焦距下的精确投影模型。
高速同步采集:通过微控制器(如Arduino)精确同步液态透镜、相机和投影仪。流程为:控制ETL切换到目标焦距 -> 等待透镜稳定 -> 同时触发投影仪投射编码条纹和相机采集。此过程在3个焦距点间循环。
自适应条纹投影:为不同焦距点投射不同空间频率的条纹,以平衡全场测量精度和抗噪性。
高效相位解算与融合:核心创新在于利用焦距信息作为几何约束,开发了高效的相位展开算法。该算法利用相邻焦距下的“清晰”与“离焦”相位图,计算一个等效的、更长周期的相位图,从而可靠地解开高频包裹相位,最终将不同焦距下测量得到的清晰区域的3D数据进行融合。
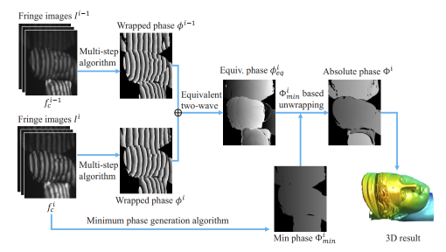
算法框架图:展示基于焦距约束的相位解包裹流程
性能指标与验证结果
基于论文中搭建的原理样机,本方案展现出了大景深成像卓越的性能:
-超大景深成像:可实现对 400mm ~ 1400mm(约1000mm深度范围)内物体的高质量测量。
-高精度:在最佳对焦位置,测量误差达到0.05% 量级(以测量深度为基准)。例如,在450mm距离处测量球体,其拟合误差平均值仅为0.017mm。
-高速测量:在采用3焦距设置、两步多频相位展开算法时,整个大景深场景的3D数据帧率可达20 Hz,具备实时测量动态物体的能力。
通过高速相机记录了ETL切换焦距时,投影条纹从清晰到模糊再到清晰的变化过程,并量化了“模糊度量”σ的响应曲线,证明了毫秒级的快速稳定能力。
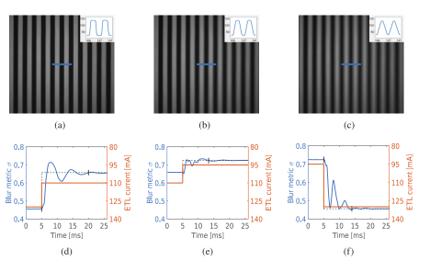
ETL动态响应特性
分别展示了相机在三个不同焦距(f_c1, f_c2, f_c3)下,对位于前、中、后三个位置的雕像的3D高分辨率成像重建结果。清晰显示:只有当相机焦距与被测物体距离匹配时,才能获得最佳质量的3D模型,证明了使用ETL进行“物理对焦”的必要性。
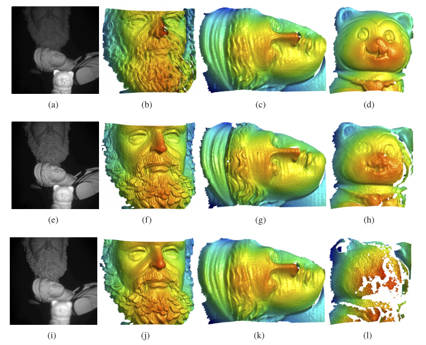
静态多目标测量效果,适用于尤其需兼顾速度与精度的场景
展示了在三个焦距下分别采集,并最终融合成一幅完整的、无模糊伪影的动态场景3D点云图,验证了系统对大深度范围动态场景的有效测量能力。
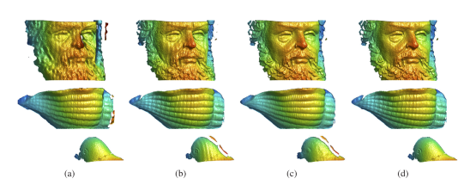
动态场景测量结果及高分辨率成像复杂曲面轮廓
上一篇:Optodiode为工业客户提供先进的光电解决方案,AXUV,SXUV,UVG确保在极端环境下的精度、可靠性和性能
下一篇:基于SH波前传感器的光程差显微镜,由光源、透明样品、物镜、镜筒透镜、夏克-哈特曼微透镜阵列(夏克哈特曼微透镜)组成


