作者:包cx 时间:2024-12-02
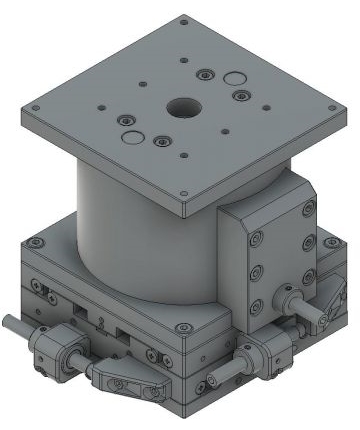
西格玛光机手动平台允许用户通过手动操作来控制载物台(即放置样品或设备的部分)沿一个或多个轴向(通常是X、Y或Z轴方向)进行精细和平滑的位移。西格玛光机手动平台的主要参数包括行程、Sigma平台的导轨形式、Optosigma平台移动精度,通过了解Sigma手动平台常见参数来选择合适的西格玛光机手动平台。
西格玛光机手动平台的技术指标:
|
指标 |
形式 |
描述 |
|
|
型号 |
***-** |
|
|
|
反手对称型号 |
***-**R |
|
|
|
台面尺寸 |
**×**mm |
|
|
|
行程 |
±**mm |
以产品的中心的位置(上板和下板在同一位置的情况下)作为基准点,用正,负表示 |
|
|
导轨形式 |
|
TSD/十字交叉滚柱/燕尾槽/螺杆驱动/滑动/V型 |
|
|
主要材料 |
|
表示产品的主要材料成分和表面处理 |
|
|
表面处理 |
|
||
|
行程/每转 |
**mm |
表示操作部分(微分头或精密调节螺杆)旋转一圈时的读数 |
|
|
微分头的安装位置 |
|
面对平台时微分头的安装方向,用中心或者侧面来表示 |
|
|
承载能力 |
**N(**kgf) |
通常表示在平台中央处可搭载的最大均布载荷(静负载) |
|
|
移动精度 |
直线度 |
*μm |
平台在整个行程范围内,以起点到终点的直线为基准,表示了偏离此基准线的范围 |
|
俯仰 |
**” |
从起点到终点的整个行程范围内,相对于运动方向的前后方向上的角度变化 |
|
|
偏摆 |
**” |
从起点到终点的整个行程范围内,相对于运动方向的左右方向上的角度变化 |
|
|
最大承载力矩 |
俯仰 |
**N·m |
最大承载力矩是指当平台中心与载荷中心发生偏离时,平台可承受的最大力矩 转动:从起点到终点的整个行程范围内,绕运动轴方向的旋转角度变化 |
|
转动 |
**N·m |
||
|
偏摆 |
**N·m |
||
|
扭矩刚度 |
俯仰 |
**”/N·cm |
扭矩刚度:是指在偏离台面中心的位置上施加载荷时(即台面中心和载荷中心不一致。)的平台的刚度。通常是指,距离台面中心1cm的位置上加载1N的负载时,台面发生的倾斜角度(单位:秒) |
|
转动 |
**”/N·cm |
||
|
偏摆 |
**”/N·cm |
||
|
平行度 |
*μm |
平台上面相对于平台下面的平行度 |
|
|
移动平行度 |
*μm |
在整个行程范围内,平台上面相对于平台下面的平行度 |
|
|
自重 |
**kg |
表示产品的自身重量 |
|
Optosigma手动位移台的行程:
以西格玛光机手动平台的中心位置(上板和下板在同一位置的情况下)作为基准点,用正负表示,往一个方向移动为正几毫米,往相反方向移动为负几毫米。西格玛光机手动平台的种类非常多,其行程主要为粗调和微调两种情况。粗调的最大行程可以达到±200mm,即400mm行程。Optosigma手动位移台的最小行程为±3mm,即6mm行程。
西格玛光机手动平台的行程主要通过旋转微分头或精密调节螺杆来控制。型号末尾为FP的西格玛光机手动平台,如,XYZ轴平面TSD平台 / TSD-1005SRFP,采用的是精密调整螺杆,在操作时需要使用六角扳手。和一般的微分头相比,精密调整螺杆的螺距为0.25mm,意味着旋转一周,移动的距离为0.25mm。
Sigma平台的导轨形式:
Sigma平台的导轨形式主要有以下六种,也有左侧以外的特殊导轨。
-TSD导轨
主要型号包括:钢/不锈钢材料的TSD/TSDH/TSDT/TSDS和铝合金材料的直动平台TADC系列,GOHT/GOHTA摆动平台系列和转动平台KSPT系列。TSD导轨方式是使用西格玛光机有的加工技术开发制造的产品,是应用最为广泛的Sigma平台的导轨形式。
-十字交叉滚柱导轨
主要型号包括:铝合金材料的直动平台TAM/TAMC系列和黄铜材料的转动平台KSPB系列。
-燕尾槽导轨
主要型号包括:黄铜材料的直动平台TASB/TAR系列、摆动平台GOH/GOHB系列和转动平台KSSA系列。
-螺杆驱动方式
-滑动导轨
主要型号包括:黄铜/不锈钢材料的转动平台KSP/KSPA/KSPS/KSW系列。
-V型导轨
西格玛光机手动平台的技术指标中的专业术语:
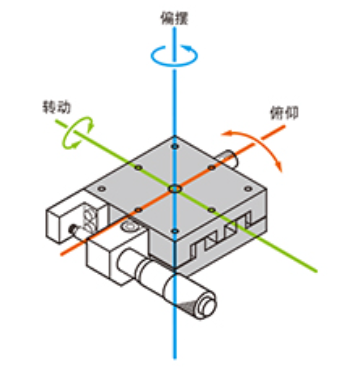
Optosigma手动位移台在运动过程中,相对于运动方向而言,可能发生以下倾斜:俯仰,前后方向的摆动;偏摆,左右方向摆动;转动,该运动方向轴的转动。如下图:
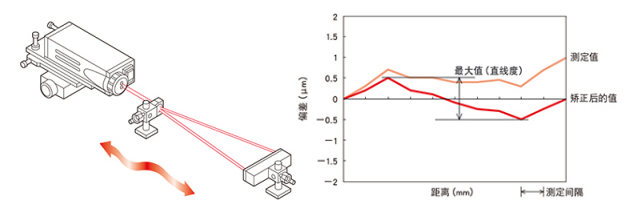
-移动精度:直线度(单位:µm)
Sigma高精度微调手动平台在整个行程范围内,以起点到终点的直线为基准,表示了偏离此基准线的范围。
水平方向的直线度
按从西格玛光机手动平台起点到终点(全行程)的方向,依次进行定位,在各位置的水平方向上,测出实际位置和水平位置的差。起点与终点的偏差修正为0后的最大值(差)为水平方向的直线度。
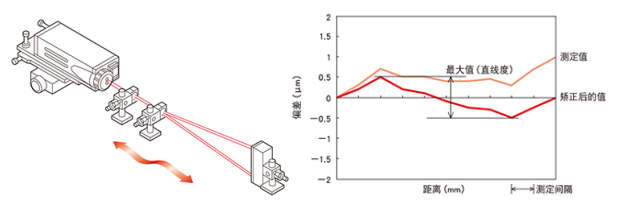
垂直方向的直线度
按从Optosigma手动位移台起点到终点(全行程)的方向,依次进行定位,在各位置的垂直方向,测出实际位置和垂直位置的差。起点与终点的偏差修正为0后的最大值(差)为垂直方向的直线度。
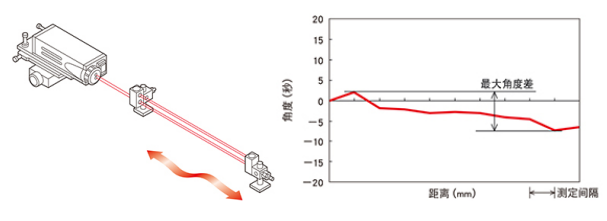
-移动精度:俯仰(单位: ”)
从起点到终点的整个行程范围内,相对于运动方向的前后方向上的角度变化。按从起点到终点(全行程)的某一方向,依次进行定位,在各位置对垂直方向的倾斜角度进行测量。定义其最大角度差为俯仰角度误差。
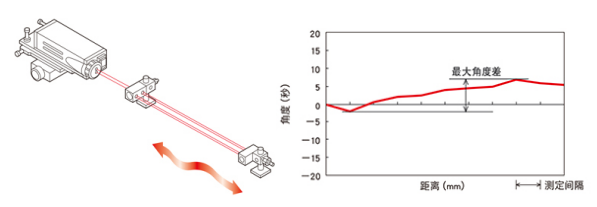
-移动精度:偏摆和转动(单位: ”)
偏摆是指从起点到终点的整个行程范围内,相对于运动方向的左右方向上的角度变化。转动是指从起点到终点的整个行程范围内,绕运动轴方向的旋转角度变化。按从西格玛光机手动平台起点到终点(全行程)的某一方向,依次进行定位,在各位置上,测量相对水平方向的左右摆动角度。定义其最大角度差为左右摆动误差。
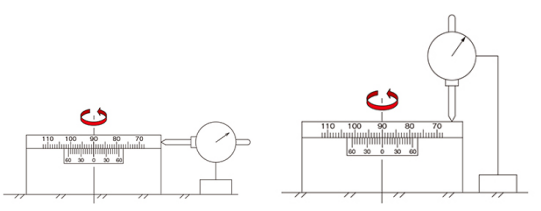
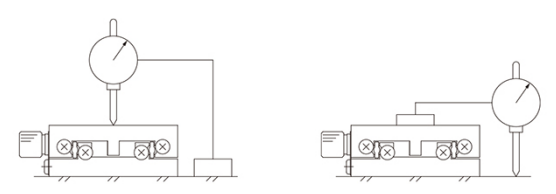
-平行度和移动平行度(单位: μm)
将固定在平板上的百分表打在Optosigma手动位移台的上,移动整个平台,进行测量。百分表显示的最大值为平行度(左图)。将平台等固定在平板上。将固定在平台上的百分表的表头打在基准平面上,全行程移动,进行测量。百分表显示的最大值为移动平行度(右图)。
-同心度和端面跳动(单位:μm)
将西格玛光机手动平台中的旋转平台固定在平板上,将百分表放在旋转平台的外周侧面,使其旋转1周进行测量。百分表显示的最大值的一半(偏离中心位置)为同心度(左图)。将固定在平板上的百分表打在旋转平台的上端边缘,使其旋转1周进行测量,百分表显示的最大值为端面跳动(右图)。