作者:戴xl 时间:2025-04-25
西格玛光机/OptoSigma/Sigmakoki采用滚动轴承为导轨,使用蜗轮蜗杆为驱动机构的步进电机型转动平台。非常适用于测量·检查·评价装置定位用的自动平台。
OSMS-YAW系列/滚动轴承电动转动平台/滚动轴承自动转动平台/OSMS十字交叉滚柱电动转动平台/OSMS十字交叉滚柱自动转动平台阵容列表如下:OSMS-40YAW,OSMS-60YAW,OSMS-60YAW-W,OSMS-80YAW,OSMS-120YAW,OSMS-160YAW,OSMS-120YAW-W。其中,台面尺寸即为型号OSMS-“XX”YAW中的“XX”,单位mm。旋转范围:逆时针旋转CCW方向无限制,顺时针旋转方向在0度附近处停止。驱动机构(减速比)均为蜗轮蜗杆(1:144),导轨形式分为滚动轴承(台面尺寸80mm及以下)和十字交叉滚柱形式(台面尺寸120mm及以下)。OSMS-YAW系列的主要材料均为铝合金・铝青铜。
|
型号 |
台面尺寸 |
旋转范围 |
承载能力 |
驱动机构(减速比) |
导轨形式 |
主要材料 |
自重 |
|
OSMS-40YAW |
φ40mm |
逆时针旋转CCW方向无限制 |
19.6N |
蜗轮蜗杆(1:144) |
滚动轴承 |
铝合金・铝青铜 |
0.35kg |
|
OSMS-60YAW |
φ60mm |
29.4N |
蜗轮蜗杆(1:144) |
滚动轴承 |
铝合金・铝青铜 |
0.45kg |
|
|
OSMS-60YAW-W |
φ60mm |
29.4N |
蜗轮蜗杆(1:144) |
滚动轴承 |
铝合金・铝青铜 |
1.0kg |
|
|
OSMS-80YAW |
φ80mm |
98N |
蜗轮蜗杆(1:144) |
滚动轴承 |
铝合金・铝青铜 |
1.1kg |
|
|
OSMS-120YAW |
φ120mm |
196N |
蜗轮蜗杆(1:144) |
十字交叉滚柱 |
铝合金・铝青铜 |
2.0kg |
|
|
OSMS-160YAW |
φ160mm |
196N |
蜗轮蜗杆(1:144) |
十字交叉滚柱 |
铝合金・铝青铜 |
2.5kg |
|
|
OSMS-120YAW-W |
φ120mm |
196N |
蜗轮蜗杆(1:144) |
十字交叉滚柱 |
铝合金・铝青铜 |
5.5kg |
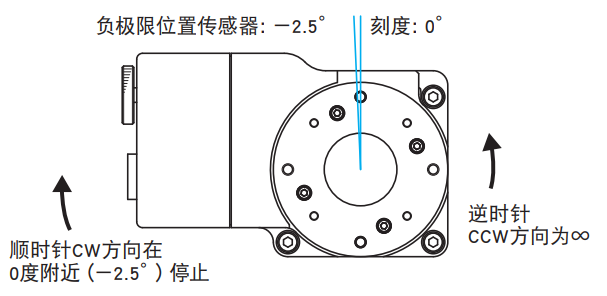
图1:OSMS-YAW系列/滚动轴承电动转动平台/滚动轴承自动转动平台/OSMS十字交叉滚柱电动转动平台/OSMS十字交叉滚柱自动转动平台转动范围
西格玛光机/OptoSigma/Sigmakoki将自动转动平台的CW方向的极限位置传感器兼为原点传感器使用了,以此位置为参考进行原点复位。我们规定,以半步细分驱动,并采用MINI方式进行原点复位操作时的停止位置为刻度0度位置。上下倒置或垂直面安装使用时需要注意,安装方向不同时,其精度或承 载能力等指标会不同的。
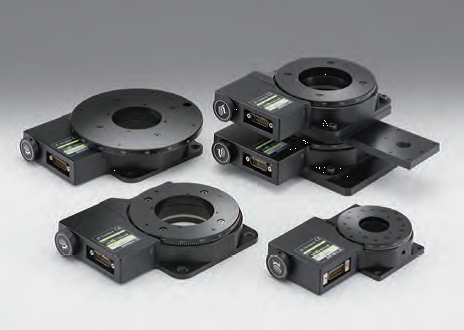
图2:OSMS-YAW系列/滚动轴承电动转动平台/滚动轴承自动转动平台/OSMS十字交叉滚柱电动转动平台/OSMS十字交叉滚柱自动转动平台
|
型号 |
OSMS-40YAW |
OSMS-60YAW |
OSMS-60YAW-W |
||
|
机械技术指标 |
转动范围 |
逆时针转动CCW方向为∞,顺时针转动CW方向在0度附近(-2.5°)停止 |
|||
|
台面尺寸〔mm〕 |
φ40 |
φ60 |
φ60 |
||
|
驱动机构(减速比) |
蜗轮蜗杆(1:144) |
蜗轮蜗杆(1:144) |
蜗轮蜗杆(1:144) |
||
|
导轨形式 |
滚动轴承 |
滚动轴承 |
滚动轴承 |
||
|
主要材料 |
铝合金·铝青铜 |
铝合金·铝青铜 |
铝合金·铝青铜 |
||
|
自重〔kg〕 |
0.35 |
0.45 |
1.0 |
||
|
精度技术指标 |
分辨率 |
(整步)〔°/脉冲〕 |
0.005 |
0.005 |
0.005 |
|
(半步)〔°/脉冲〕 |
0.0025 |
0.0025 |
0.0025 |
||
|
最大速度〔°/sec〕 |
30 |
30 |
30 |
||
|
定位精度〔°〕 |
0.1 |
0.1 |
- |
||
|
重复定位精度〔°〕 |
0.02 |
0.02 |
0.02 |
||
|
承载能力〔N〕 |
19.6(2.0kgf) |
29.4(3.0kgf) |
29.4(3.0kgf) |
||
|
扭矩刚度〔″/N·cm〕 |
2 |
1 |
- |
||
|
空行程〔°〕 |
0.05 |
0.05 |
0.05 |
||
|
传动副间隙〔°〕 |
0.1 |
0.1 |
0.1 |
||
|
平行度〔μm〕 |
50 |
50 |
- |
||
|
同心度〔μm〕 |
30 |
30 |
- |
||
|
台面跳动量〔mm〕 |
0.02 |
0.02 |
- |
||
|
传感器 |
传感器型号 |
微型光电传感器:PM-F25(SUNX(株)) |
微型光电传感器:PM-R25(SUNX(株)) |
微型光电传感器:PM-R25(SUNX(株)) |
|
|
极限位置传感器 |
有(常闭) |
有(常闭) |
有(常闭) |
||
|
原点传感器 |
无 |
无 |
无 |
||
|
近接原点传感器 |
无 |
无 |
无 |
||
|
电机/传感器技术指标 |
||
|
电机 |
类型 |
5相步进电机 0.75A/相(多摩川精机(株)) |
|
型号 |
TS3664N4E10(□24mm) |
|
|
步距角 |
0.72° |
|
|
传感器 |
电源电压 |
DC5〜24V±10% |
|
消耗电流 |
15mA以下 |
|
|
输出端电气特性 |
NPN集电极开路输出 DC30V以下50mA以下 |
|
|
信号的含义 |
遮光时:输出晶体管OFF(截止) |
|
|
推荐选用的驱动器/控制器型号 |
||
|
电器系统 |
驱动器 |
SG-5M,SG-5MA,MC-S0514ZU,SG-514MSC,MC-7514PCL |
|
控制器 |
GSC-01,GSC-02,SHOT-702,GIP-101,HSC-103,SHOT-302GS,SHOT-304GS,HIT-M·HIT-S,PGC-04-U |
|
|
型号 |
OSMS-80YAW |
OSMS-120YAW |
OSMS-160YAW |
OSMS-120YAW-W |
||
|
机械技术指标 |
转动范围 |
逆时针转动CCW方向为∞,顺时针转动CW方向在0度附近(-2.5°)停止 |
||||
|
台面尺寸〔mm〕 |
φ80 |
φ120 |
φ160 |
φ120 |
||
|
驱动机构(减速比) |
蜗轮蜗杆(1 :144) |
蜗轮蜗杆(1 :144) |
蜗轮蜗杆(1 :144) |
蜗轮蜗杆(1 :144) |
||
|
导轨形式 |
滚动轴承 |
十字交叉滚柱 |
十字交叉滚柱 |
十字交叉滚柱 |
||
|
主要材料 |
铝合金·铝青铜 |
铝合金·铝青铜 |
铝合金·铝青铜 |
铝合金·铝青铜 |
||
|
自重〔kg〕 |
1.1 |
2.0 |
2.5 |
5.5 |
||
|
精度技术指标 |
分辨率 |
(整步)〔°/脉冲〕 |
0.005 |
0.005 |
0.005 |
0.005 |
|
(半步)〔°/脉冲〕 |
0.0025 |
0.0025 |
0.0025 |
0.0025 |
||
|
最大速度〔°/sec〕 |
30 |
30 |
30 |
30 |
||
|
定位精度〔°〕 |
0.15 |
0.1 |
0.1 |
- |
||
|
重复定位精度〔°〕 |
0.02 |
0.02 |
0.02 |
0.02 |
||
|
承载能力〔N〕 |
98(10.0kgf) |
196(20.0kgf) |
196(20.0kgf) |
196(20.0kgf) |
||
|
扭矩刚度〔″/N·cm〕 |
0.2 |
0.1 |
0.1 |
- |
||
|
空行程〔°〕 |
0.05 |
0.05 |
0.05 |
- |
||
|
传动副间隙〔°〕 |
0.08 |
0.08 |
0.08 |
0.08 |
||
|
平行度〔μm〕 |
50 |
50 |
60 |
- |
||
|
同心度〔μm〕 |
30 |
30 |
30 |
- |
||
|
台面跳动量〔mm〕 |
0.02 |
0.02 |
0.02 |
- |
||
|
传感器 |
传感器型号 |
微型光电传感器:PM-F25(SUNX(株)) |
||||
|
极限位置传感器 |
有(常闭) |
有(常闭) |
有(常闭) |
有(常闭) |
||
|
原点传感器 |
无 |
无 |
无 |
无 |
||
|
近接原点传感器 |
无 |
无 |
无 |
无 |
||
|
电机/传感器技术指标 |
||
|
电机 |
类型 |
5相步进电机 0.75A/相(ORIENTAL MOTOR(株)) |
|
型号 |
PK525HPB-C4(□28mm) |
|
|
步距角 |
0.72° |
|
|
传感器 |
电源电压 |
DC5〜24V±10% |
|
消耗电流 |
15mA以下 |
|
|
输出端电气特性 |
NPN集电极开路输出 DC30V以下50mA以下 |
|
|
信号的含义 |
遮光时:输出晶体管OFF(截止) |
|
|
推荐选用的驱动器/控制器型号 |
||
|
电器系统 |
驱动器 |
MC-S0514ZU,SG-514MSC,MC-7514PCL |
|
控制器 |
SHOT-702,HSC-103,GIP-101,SHOT-302GS,SHOT-304GS,HIT-M·HIT-S,PGC-04-U |
|


